Obstacle Detection and Pathplanning¶
Pathplanning for a single robot is easy as long as there are no obstacles to move around. In our case pathplanning can be challenging due to the dynamic nature of the robots on the field. There are multiple ways to detect obstacles. First we can detect if we are pushed or not able to move as expected. Then we can detect obstacles from further away with the ultrasound sensors or by detecting robots and other obstacles elements in the image. We can also take the broadcasted positions of our teammates into account.
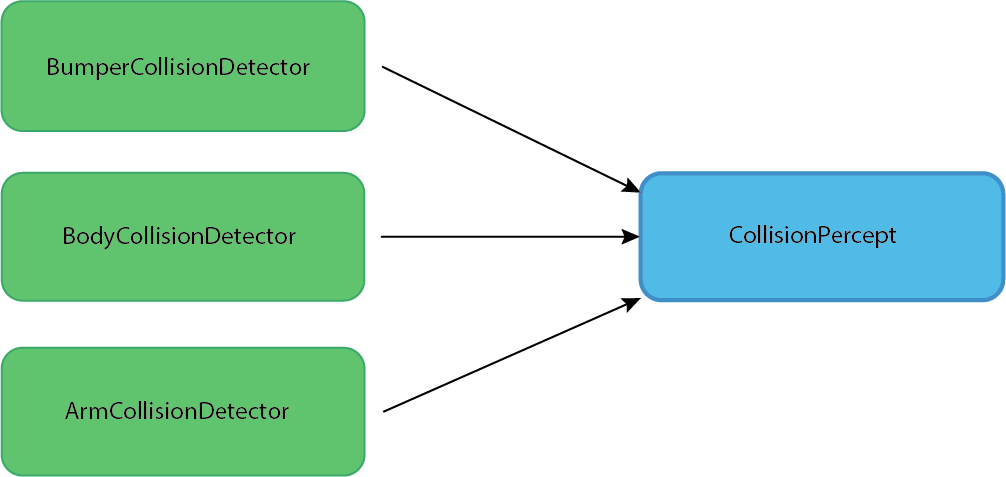
Collision Detection¶
We have three different methods to detect collisions. The ArmCollisionDetector module detects wether the arm movements
are blocked. In this case we try to move our arms back to reduce the width of the robot.
The BumperCollisionDetector module detects if the bumper on the feet are pressed for a period of time. This happens
when the robots walks into a fallen robot or agains a goalpost.
The BodyCollisionDetector module detects wether the robot was pushed.
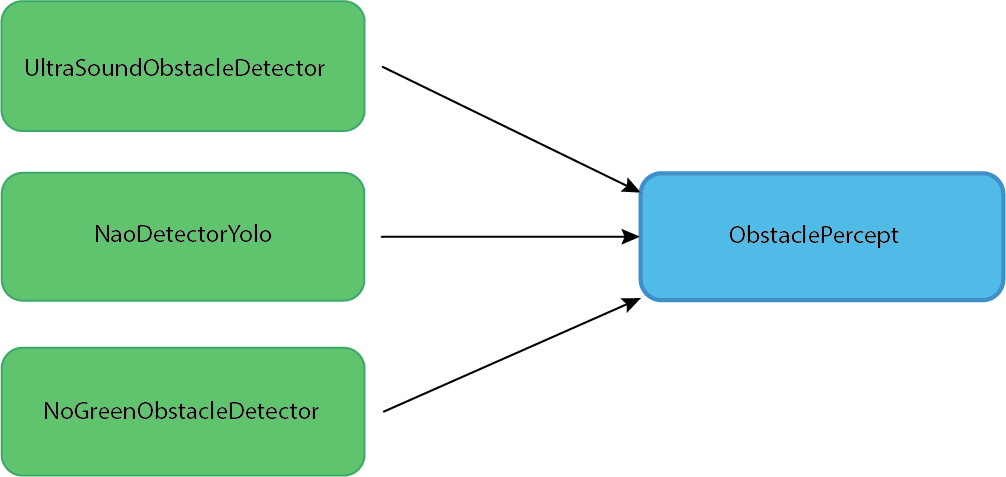
Obstacle Detection¶
- Ultrasound
- NoGreenDetection
- Robot Detection via Deep Learning
Modeling the obstacles¶
Pathplanning¶
TODO: steffen