Visual Perception¶
Visual perception is the primary way for the NAO robot of perceiving its environment. To reduce computational complexity our vision is based on a reliable field color detection. This color information is used to estimate the boundaries of the visible field region in the image. Which is done while scanning for line edgels - oriented jumps in the brightness channel. Detection of other objects - lines, ball, goals - is performed within this field region. Lines are modeled as a graph of the aforementioned edgels. Ball detection consists mainly of two steps - key points (ball candidates) are detected using integral image and difference of gaussians, which are then classified by a trained cascade classifier. Goal post detection uses scan lines along the horizon.
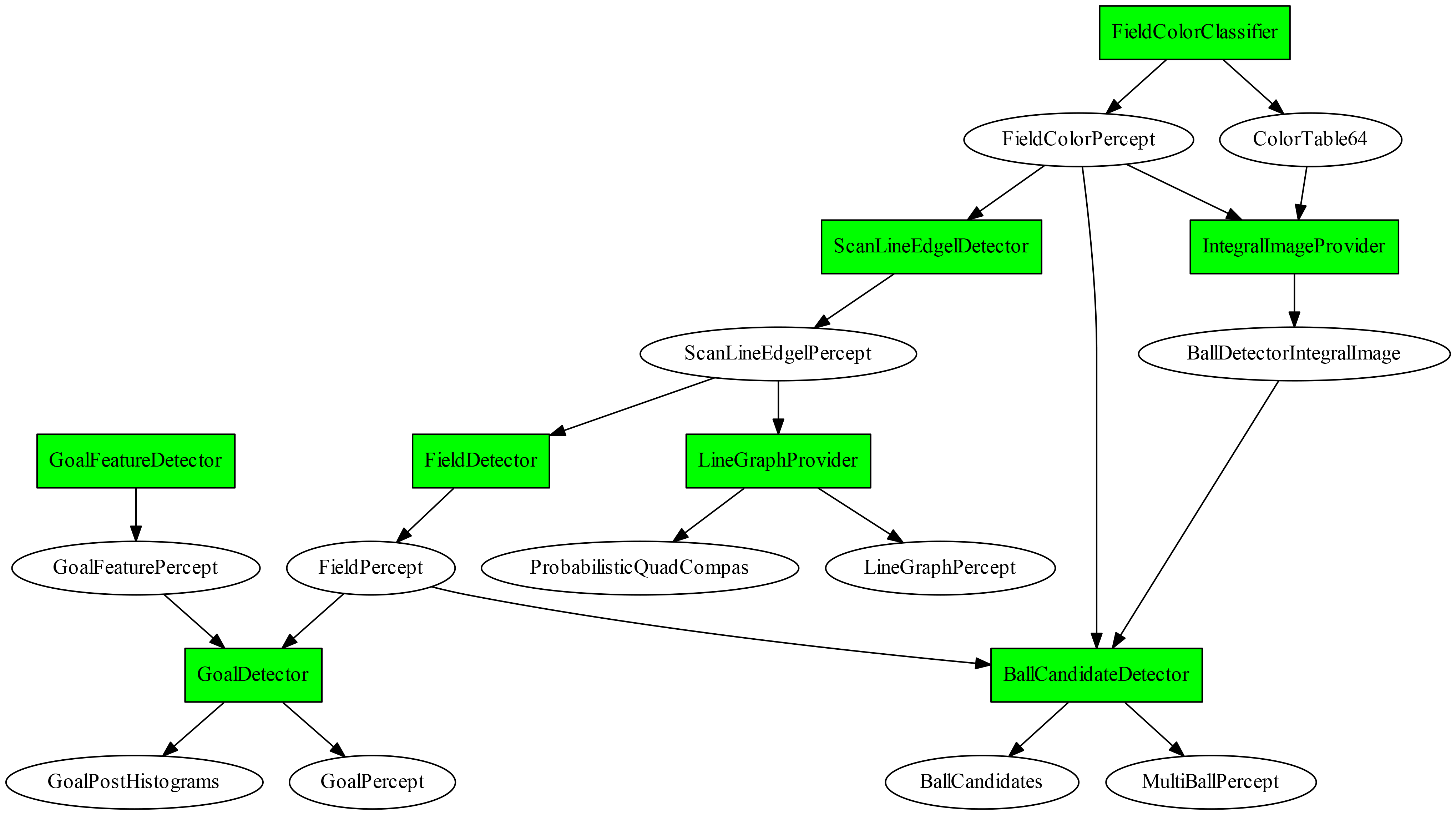
The image below shows the dependency graph for the vision modules and the representations they provide, which were used at the RoboCup 2016 competition. In the following we describe some of the important modules in more detail.
Green Detection¶
This section describes a new approach to classify the field color which has been used since late 2015. For the first time this approach has been presented in November 2015 at the RoHOW workshop in Hamburg, Germany. This constitutes the first step in the attempt for a automatic field color detection. Thereby we analyze the structure of the color space perceived by the robot NAO and propose a simple yet powerful model for separation of the color regions, whereby green color is of a particular interest.

To illustrate our findings we utilize a sequence of images from recorded by a robot during the Iran Open 2015. The left image above is a representative image from this sequence.
To analyze the coverage of the color space we calculate two color histograms over the whole image sequence. In the Figure 4.6{reference-type="ref" reference="fig:green-hist"} (left) you can see the uv-histogram, which is basically a projection of the yuv-space onto the uv-plane. The light green points indicate the frequency of a particular uv-value (the brighter the more). One can clearly recognize three different clusters: white and gray colors in the center; green cluster oriented towards the origin; and a smaller cluster of blue pixels in the direction of the u-axis which originate from the boundaries around the field. For the second histogram we choose a projection plane along the y-axis and orthogonal to the uv-plane which is illustrated in the Figure 4.6{reference-type="ref" reference="fig:green-hist"} (left) by the red line. This plane is chosen in a way to illuminate the relation between the gray cluster in the center and the green cluster. Figure 4.6{reference-type="ref" reference="fig:green-hist"} (middle) illustrates the resulting histogram. Here we clearly see the gray and the green cluster.
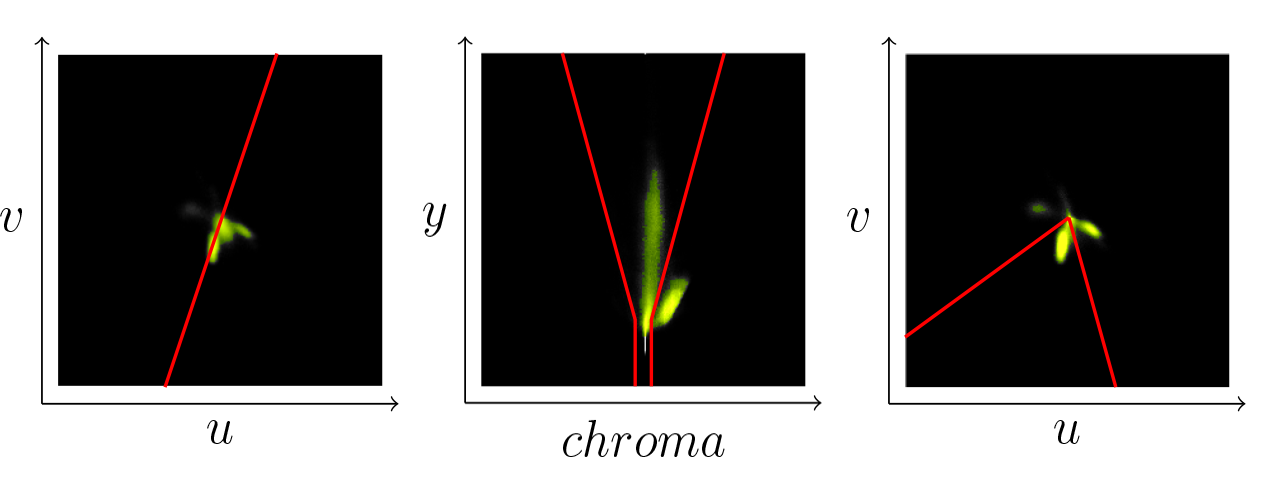
From these two histograms we can make following observations: all colors seem to be concentrically organized around the central brightness axis , i.e., gray axis \((128,128,y)\), which corresponds to the general definition of the yuv-space; the colors seem to be pressed closer to the gray axis the darker they are. In particular all colors below a certain y-threshold seem to be collapsed to the gray axis. So we can safely claim that for a pixel \((y,u,v)\) always holds \(y=0 \Rightarrow u,v=128\). On the contrary the spectrum of colors gets wider with the rising brightness. Speculatively one could think that the actual space of available colors is a hsi-cone fitted into the yuv-cube. The collapse of the colors towards the gray axis might be explained by an underlying noise reduction procedure of the camera.
Based on these observations we can divide the classification in two steps: (1) separate the pixels which do not carry enough color information, i.e., these which are too close to the gray axis. Figure 4.6{reference-type="ref" reference="fig:green-hist"} (middle) illustrates a simple segmentation of the gray pixels with a cone around the center axis illustrated by the red lines; (2) classify the color in the projection onto the uv-plane. Figure 4.6{reference-type="ref" reference="fig:green-hist"} (right) shows the uv-histogram without the gray pixels. Red lines illustrate the separated uv-segment which is classified as green. This way we ensure independence from brightness. The equation [eq:green]{reference-type="ref" reference="eq:green"} illustrates the three conditions necessary for a pixel \((y,u,v)\) to be classified as green. The five parameter are \(b_o\in[0,255]\) the back cut off threshold, \(b_m, b_M\in [0,128]\) with \(b_m<b_M\) the minimal and the maximal radius of the gray cone, and finally \(a_m,a_M\in[-\pi, \pi]\) defining the green segment in the uv-plane.
The classification itself doesn't require an explicit calculation of histograms. At the current state it's a static classification depending on five parameters to define the separation regions for the gray and green colors. These parameters can be easily adjusted by inspecting the histograms as shown in the Figure 4.6{reference-type="ref" reference="fig:green-hist"} and have proven to be quite robust to local light variation.
The structure of the color space depends of course largely on the adjustments of the white balance. We suspect a deviation from a perfect white balance adjustment results in a tilt of the gray cluster towards blue region if it's to cool and towards red if it's too warm. The tilt towards blue can be seen in the Figure 4.6{reference-type="ref" reference="fig:green-hist"} (middle). This might be a queue for an automatic white balance procedure which would ensure an optimal separation between colored and gray pixels. The green region shifts around the center depending on the general lighting conditions, color temperature of the carpet and of course white balance. In the current example the green tends rather towards the blue region. Tracking these shifts might be the way for a fully automatic green color classifier which would be able to cover the variety of the shades to enable a robot to play outside.
ScanLineEdgelDetector¶
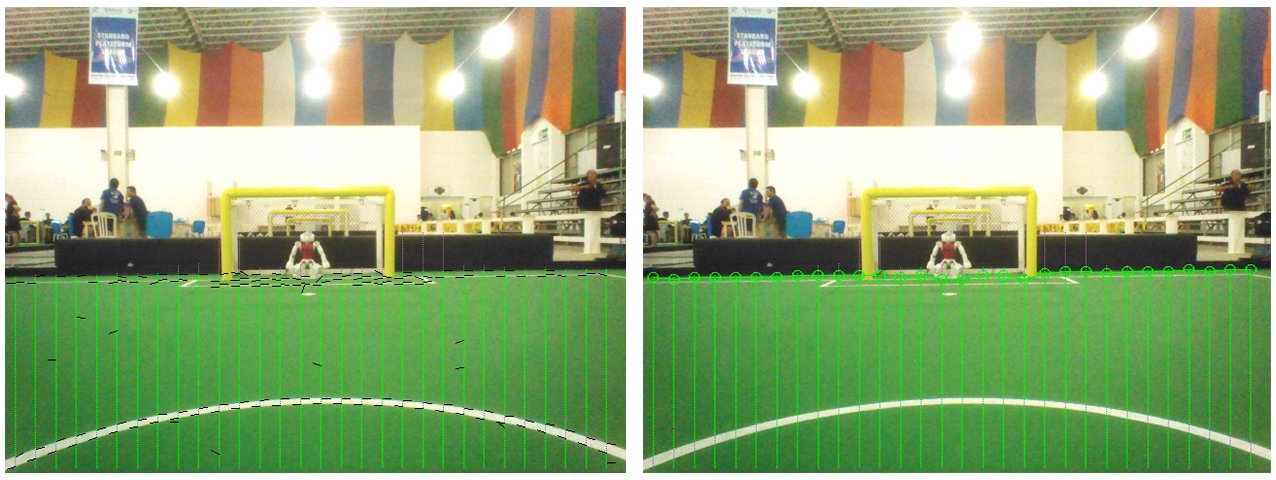
With this module we detect field line border points and estimate some points of the field border. To do this, we use scanlines, but only vertical ones. Along every scanline jumps are detected in the Y channel, using a 1D-Prewitt-Filter. A point of the field lines border is located at the maximum of the response of that filter. We estimate with two 3x3-Sobel-Filters (horizontal and vertical) the orientation of the line. With the result of the field color classification we detect along every scanline a point, which marks the border of the field.
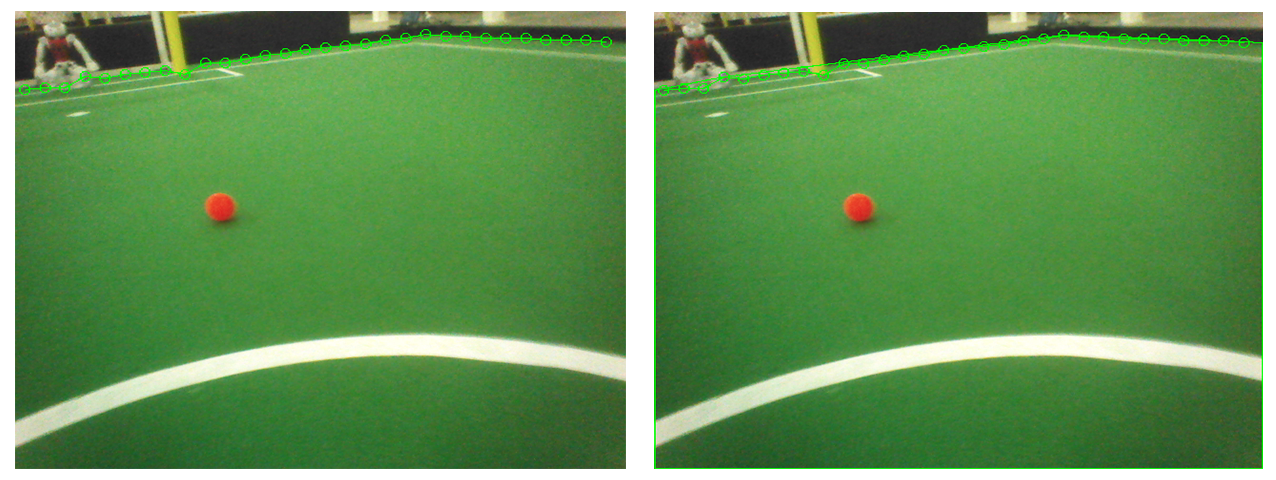
FieldDetector¶
With the field border points, estimated with the ScanLineEdgelDetector, we calculate for each image a polygon, which is representing the border of the field in the image.
LineGraphProvider¶
This module clusters neighbouring line border points, detected by ScanLineEdgelDetector.

RansacLineDetector¶
This module detects lines on the directed points generated by the LineGraphProvider using the Random sample consensus (RANSAC) method. Our implementation can be summarized by the following 4 steps.
-
We pick two random directed points with a similar orientation to form a model of the Line. This will be a line candidate.
-
We count the inliers and outliers of the model. A point is marked as an inlier, if it is close to the line and has a similar direction. We accumulate the error of the distance for later validation.
-
If a model has a sufficient amount of inliers, it may be considered as a valid line. We repeat the above steps for a number of iterations and continue with the best model according to the amount of inliers and the smallest error in distance.
-
Finally, we determine the endpoints of the line. We choose them as the maximum and minimum x and y values of the inliers. If the length of the line is sufficient, a field line is returned.
In order to detect the remaining field lines we repeat this procedure on the remaining outliers until no lines are found.
GoalFeatureDetector¶
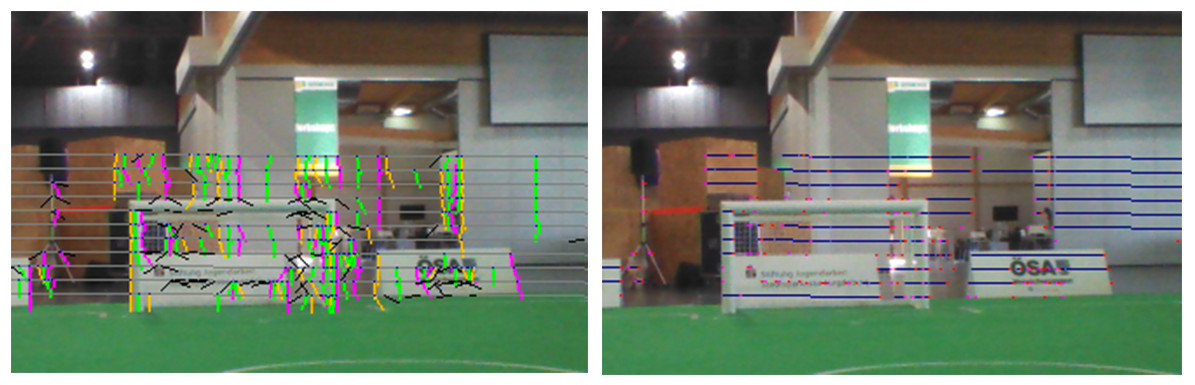
This module is the first step of the goal post detection procedure. To detect the goal posts we scan along the horizontal scan lines parallel to the artificial horizon estimated in ArtificialHorizonProvider. Similar to the detection of the field line described in Section 4.2{reference-type="ref" reference="s:ScanLineEdgelDetector"} we detect edgels characterized by the jumps in the pixel brightness. These edgels are combined pairwise to goal features, which are essentially horizontal line segments with rising and falling brightness at the end points. Figure 4.8{reference-type="ref" reference="fig:GoalFeatureDetector"} illustrates the scan lines as well as detected edgels (left) and resulting goal post features (right).
GoalDetector¶
The GoalDetector clusters the features found by the GoalFeatureDetector. The main idea here is, that features, which represent a goal post, must be located underneath of each other. We begin with the scan line with the lowest y coordinate and go through all detected features. Then the features of the next scan lines (next higher y coordinate) are checked against these features. Features of all scan lines, which are located underneath of each other, are collected into one cluster. Each of these clusters represents a possible goal post.
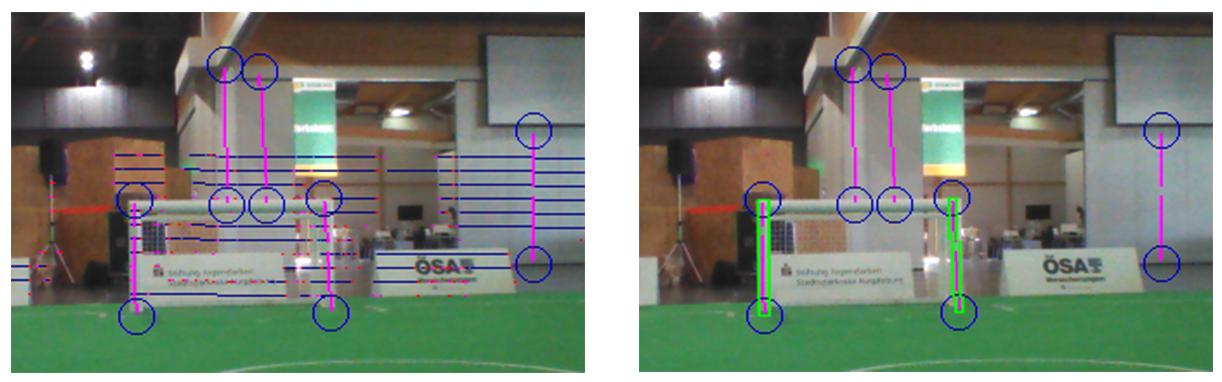
From the features of a cluster, the orientation of the possible goal post is estimated and used to scan up and down along the estimated goal post. This is done to find the foot and the top point of that goal post. A goal post is seen as valid, if its foot point is inside of the field polygon as described in the Section 4.3{reference-type="ref" reference="s:FieldDetector"}. Using the kinematic chain the foot point is projected into the relative coordinates of the robot. Based on this estimated position the expected dimensions of the post are projected back into the image. To be accepted as a goal post percept a candidate cluster has to satisfy those dimensions, i.e., the deviation should not exceed certain thresholds. The Figure 4.10{reference-type="ref" reference="fig:GoalDetector"} illustrates the clustering step and the evaluation of the candidate clusters. Although there seem to be a considerable amount of false features, both posts of the goal are detected correctly.
Black&White Ball Detection¶
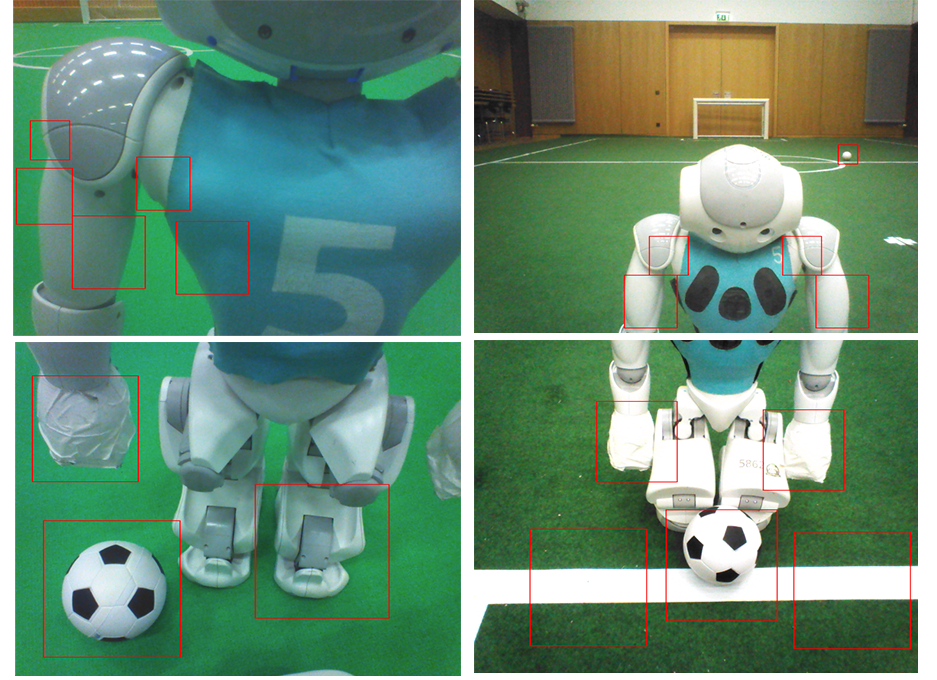
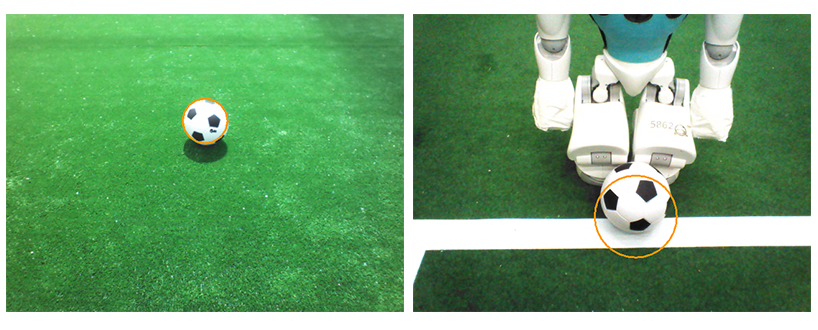
In 2015 the standard ball used in competitions changed to a black&white foam ball as illustrated in Figure 4.13{reference-type="ref" reference="fig:bw-ball"}. Detection of such a ball in the SPL setup poses a considerable challenge. In this section we describe our strategy for detecting a black&white ball in a single image and the lessons learned.
Given an image from the robot camera the whole approach is basically divided into two steps: finding a small set of suitable candidates for a ball by a fast heuristic algorithm, and classifying the candidates afterwards with a more precise method.

Candidate Search -- Perspective Key Points Detection¶
Properties of the ball as an object that can be assumed as known include
-
it has a fixed size;
-
it has a round shape (symmetrical shape);
-
it is black and white (so it does not contain other colors);
-
the pattern is symmetric;
These properties have some implications on the appearance of the ball in a camera image:
-
knowing the pose of the camera we can estimate the balls size in the image;
-
it mostly does not contain other colors than black and white (chroma is low). Note: beware of reflections;
-
looking only at the color distribution we can assume it's rotation invariant;
Having the limited computational resources in mind, we are looking now for following three things:
-
a simple object representation for a ball in image;
-
an effective and easy to calculate measure quantifying the likelihood such object to represent an actual ball;
-
a tractable algorithm to find a finite set of local minimas of this measure over a given image (these minimal elements we then call candidates);
Representation:¶
In our case we define a ball candidate (more general a key point) as a square region in the image which is likely to contain a ball. Such a key point \(c = (x,y,r)\) can be described by its position in the image \((x,y)\) and its side radius (half side length) \(r\). Basically we represent a circular object by the outer square (bounding box) enclosing the circle. This leads to a vast number of possible candidates in a single image and a necessity for an efficient heuristic algorithm to find the most likely ones.
Measure:¶
Intuitively described, a good key point is much brighter inside than on its outer border. For a key point \(c = (x,y,r)\) we define its intensity value \(I(c)\) by
where \(Y(j,i)\) is the \(Y\)-channel value of the image at the pixel \((i,j)\). For the intensity of the outer border around \(c\) with the width \(\delta > 0\) holds \(I(c_\delta) - I(c)\), with \(c_\delta:= (x,y,r\cdot(1+\delta))\). Now we can formulate the measure for \(c\) by
This measure function can be calculated very effectively using integral images. Figure 4.17{reference-type="ref" reference="fig:bw-patch-function"} (left) illustrates the measure function for the valid pixels of the image.
Finding the local maxima:¶
To save resources the search is performed only within the estimated field region (cf. Section 4.3{reference-type="ref" reference="s:FieldDetector"}). For a given point \(p = (i,j)\) in image we estimate the radius \(r_b(i,j)\) that the ball would have at this point in the image using the camera matrix. This estimated radius is used to calculate the measure function at this point: \(V(p):= V((i,j,r_b(i,j)))\). Currently we only consider points at which the ball would be completely inside the image. The following algorithm illustrates how the local maxima of this function are estimated:
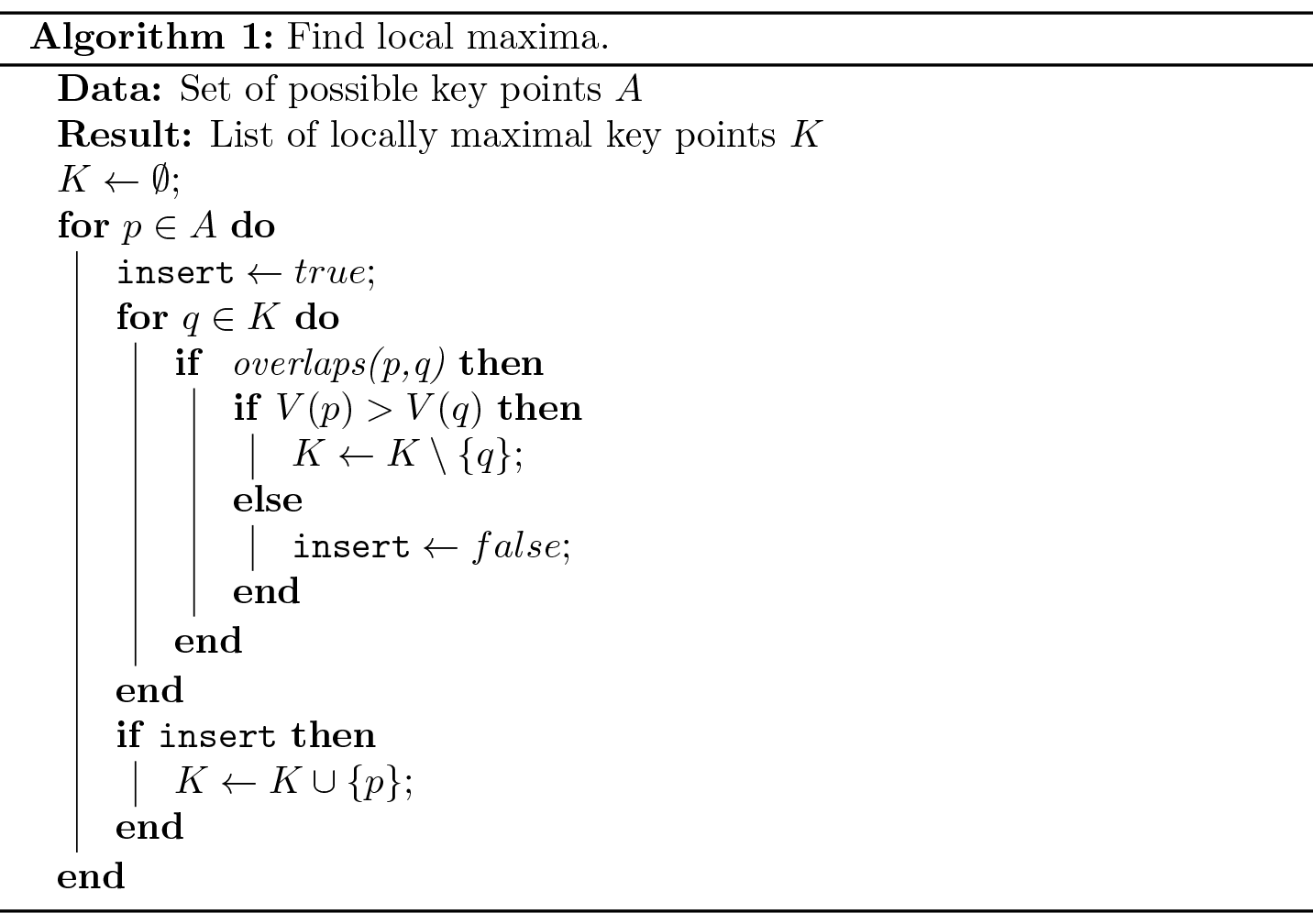
The basic idea is to keep only the key points with higher value than any other overlapping key points, i.e., the one with the highest value in it's neighborhood. To generate the list of possible key points we iterate over the image and generate key points for each pixel. Of course a number of heuristics is used to make the process tractable. In particular we only consider every 4th pixel and only if it is within the estimated field region. The list of local maxima is also limited to 5 elements - the list is kept sorted and any additional key points with lower value are discarded.
Figure 4.17{reference-type="ref" reference="fig:bw-patch-function"} (right) and Figure 4.21{reference-type="ref" reference="fig:bw-patches"} illustrate the detected best 5 local maxima of the measure function.

Classification¶
In the previous section we discussed how the number of possible ball candidates can be efficiently reduced. At the current state we consider about 5 candidates per image. In general these candidates look very ball alike, e.g., hands or feet of the robots, and cannot be easily separated. To solve this we follow the approach of supervised learning, which mainly involves collecting positive and negative samples, and training a classifier. In the following we outline our approach for fast collection of the sample data and give some brief remarks about our experience with the OpenCV Cascade Classifier which we used during the RoboCup competition in 2016.
Sample Data Generation¶
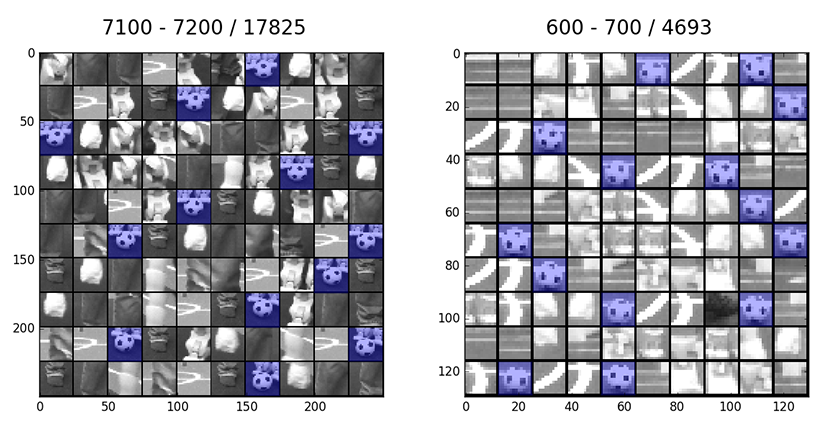
Collecting sample data basically involves two steps: collecting images from game situations and labeling the ones containing the ball. This can be a very tedious and time consuming task. To simplify and accelerate the process we collect only the candidate patches calculated by the algorithm in Section 4.8.1{reference-type="ref" reference="s:ball:candidate"}. This allows to collect the data during a competition game at full frame rate. This however produces a vast amount of data to be labeled. Because the patches are quite small (we experimented with sizes between \(12px\times 12px\) and \(24px\times 24px\)), a large number of patches can be presented and reviewed at once. Figure 4.23{reference-type="ref" reference="fig:bw-ball-labeling"} illustrates two examples of the labeling interface. Patches are presented in pages consisting of a \(10\times10\) matrix. Labels can be applied or removed simply by clicking with the mouse at a particular patch.
Classification with Convolutional Neural Networks¶
In the last step the generated ball candidates (patches) are classified.
At the current point we distinguish two classes: ball and noball. As
a classifier we use a Convolutional Neural Network (CNN). The weights of
the network are trained in MatLab with the help of the Neural Network
Toolbox. The resulting network is exported with our custom export
function createCppFile.m to optimized hard coded implementation of the
network in C++. The generated files are included in the project and
directly used by the ball detector. All corresponding functions can be
found in the directory Utils\MatlabDeepLearning. Example of the
resulting classification can be found in .
Acknowledgment¶
Some of the most important parts of this ball detection procedure were
inspired by very fruitful discussions with the RoboCup community. At
this point we would like to thank in particular the team NaoDevils for
providing their trained CNN classifier during the RoboCup 2017
competition. This classifier is included in our code base and can be
used for comparison purposes. It can be found in\
...\VisualCortex\BallDetector\Classifier\DortmundCNN.